|

伺服驱动器
伺服驱动器,也称为伺服放大器,负责为系统中的伺服电机供电。伺服驱动器是评估伺服系统性能的关键部件。在自动加工系统中,伺服驱动器比直功率放大器有几个优势,包括优越的定位、速度和运动控制。
伺服系统介绍
伺服机构是自动控制系统,用于机器人、工业自动化和制造等各种应用。在运动应用中,具有伺服驱动器的闭环系统(见图1)比开环系统(见图2)提供更高的可靠性和精度。为什么呢?与开环系统相反,它们使用反馈来解释误差和系统干扰。
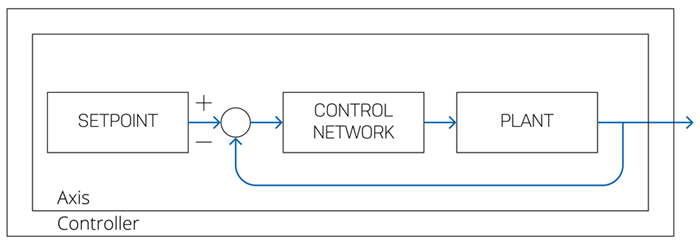
图1.闭环系统
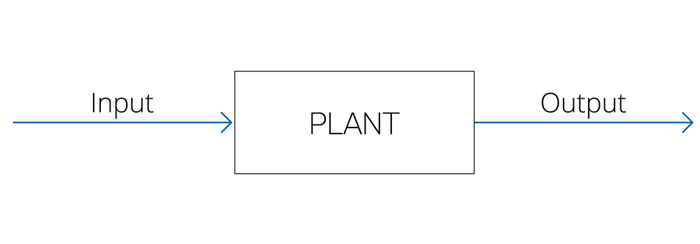
图2.开环系统
模拟与数字
模拟或数字输入可用于控制伺服驱动器。本质上,伺服驱动器负责将控制器的低功率命令信号转换为电机的高功率电压和电流。伺服驱动器可以根据应用调节和正确协调电机的期望位置、速度、扭矩和其他参数。
模拟伺服驱动器已经在一些运动控制应用中使用多年。模拟驱动器不需要任何处理时间,通常比数字驱动器成本更低。在多轴应用中,模拟伺服驱动器是手动配置的,并依赖于集中控制器。
然而,数字伺服驱动器可以使用网络和命令进行通信。数字伺服驱动器比模拟设备具有更大的配置和性能能力。现代伺服驱动器由于其增加的智能性而提供了卓越的诊断优势。
今天,大多数行业使用标准化现场总线网络进行运动控制。工业以太网使制造商能够在时间关键型应用中运行。虽然每个网络都有其优点,但有些产品是为特定的现场总线网络设计的。浦卓科技开发了驱动器,可提供广泛的通信接口,包括以太网、EtherCAT、RS485(最大50MBps)和CAN。
闭环vs开环
伺服驱动器使用反馈跟踪装置,最常见的是编码器,通过其控制回路将信号传输回主控制器,以考虑预期误差。运动控制系统中的反馈装置评估控制输入命令与机构或控制轴的实际反馈之间的误差,并相应地调整系统行为。这种反馈响应表示闭环系统。
通过进行所需的电流或电压修改,伺服驱动器可以调节实际和期望电机位置/速度之间的差。这与没有反馈装置的开环系统形成对比,在开环系统中,即使位置/速度输入命令类似于闭环系统,电机也可能以不正确的转速旋转。
这使得伺服驱动器的使用非常适合需要位置控制的自动系统。伺服驱动器可以将轴调节到其所需位置,而不考虑摩擦或其他干扰,无论它只是定位阀门还是以纳米级精度移动。
关闭
Prodrive技术提供了几种现成的驱动选项。这些驱动器可以在独立模式下运行,与我们的一个运动控制器结合使用,或者可以集成在现有的运动控制系统中。浦卓科技提供多种不同配置的伺服驱动产品,包括一个封装中的多电机输出、超低输出噪声、高输出线性度和广泛的连接选项。