|

伺服驱动
在工业过程中,运动控制系统用于以受控方式移动特定负载。在这些系统中可以使用气动、液压或机电致动技术。致动器类型是一种提供能量以移动负载的装置,根据功率、速度、精度和成本考虑进行选择。在机电系统中,电机用作致动器,通过与电磁场相互作用产生功率。这些电机可以旋转或线性配置移动。这种系统适应性强、效率高、价格合理,通常用于要求高精度、低至中等功率和高速的应用中。
开环vs闭环
运动控制系统分为两种主要类型,开环系统和闭环系统。开环系统在依赖于时间的输入上操作,并且不需要来自输出的任何反馈(见图1)。这些系统简单,维护成本低,成本效益高。例如洗衣机、烤面包机、手烘干机等等。
在闭环系统中,反馈跟踪装置(最常见的是光学编码器)用于将信号传输回控制器,以考虑预期误差。控制器评估控制输入(参考命令)和机构或控制轴的实际反馈之间的误差,并相应地调整系统行为(见图2)。
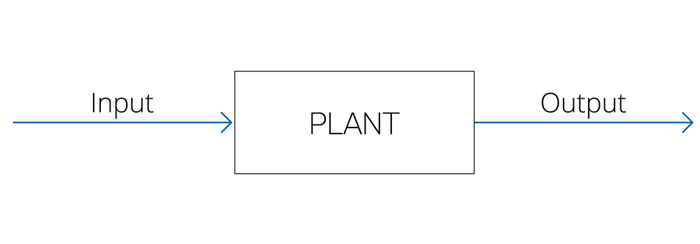
图片1:开环系统
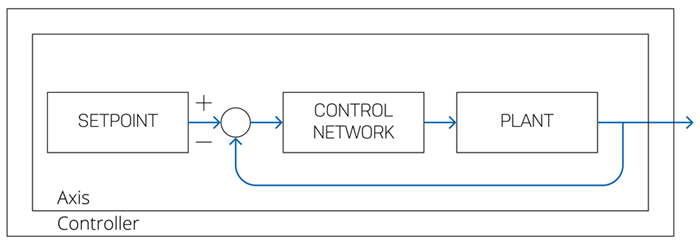
图片2:闭环系统
下图是由运动控制器、伺服驱动器、带反馈装置的电机和负载组成的运动控制系统的典型配置。
以下每种产品在实现精确的电机控制和提高系统效率方面都具有独特的作用。考虑到这个数字,让我们将系统分解为单个组件,并单独讨论系统的每个部分。
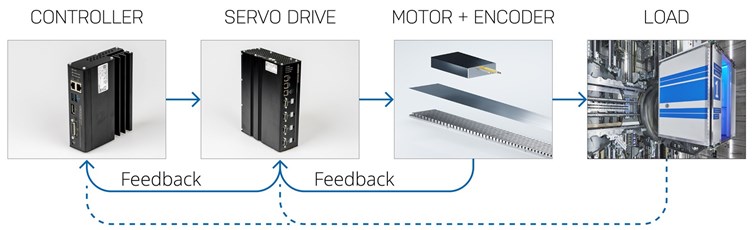
图片3:运动控制系统
负载
当设计运动控制系统时,负载或最终运动部件是起点。在选择任何组件之前,了解应用程序架构至关重要,因为它在很大程度上决定了机器或自动化系统的性能。例如,必须预先确定所需的运动特性,如急动、加速度、减速、速度和位置,以选择正确的电机和驱动器。由于轴承、齿轮箱、减速器、滚珠丝杠和各种连杆等移动机械部件引起的系统扰动和不稳定性将影响控制系统的选择和所需的运动控制器性能。高详细的应用要求和规格信息将产生高效且经济的运动控制系统。
反馈装置
在运动控制系统中,反馈装置用于监控电机或负载的位置和速度。一旦这样的信息可用,运动控制器就可以解释系统中的错误并作出相应的反应。编码器有两种主要类型:绝对式和增量式,可用于旋转和线性电机。绝对编码器是反馈装置,可以在内部存储确定的位置信息。它们为每个位置输出唯一的字或位,并能够在编码器断电时保持位置信息。与绝对编码器不同,增量编码器使用光脉冲来指示位置变化。它们通常由两个相位偏移的通道组成,这允许确定移动方向。与绝对编码器不同,它们在断电后无法存储位置信息;因此,它们通常与绝对指示器(如限位开关或硬停止)组合以确定初始位置。编码器中的第三通道(通常称为Z索引脉冲)也可用于确定轴的起始位置。
马达
电机是将来自驱动器的电流和电压转换为机械运动的电机。电机可以是有刷电机或无刷电机、旋转电机或线性电机。直流电机一般可分为两类:;单相有刷电机和三相无刷电机(见图4)。单相电机使用两条电源线:热线和中性线,而三相电机使用三条电源线,由三个频率相同的交流电驱动。
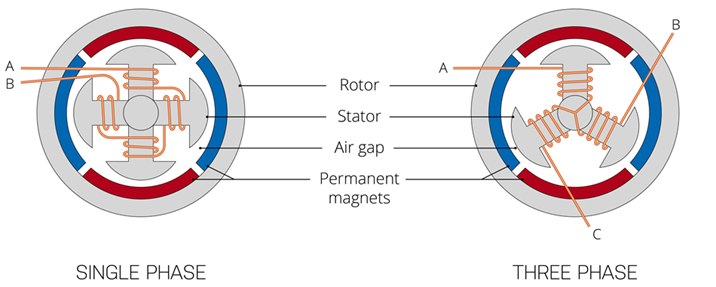
图片4:单向电机和三向电机
单相电动机
有刷直流
电机是将来自驱动器的电流和电压转换为机械运动的电机。电机可以是有刷电机或无刷电机、旋转电机或线性电机。直流电机一般可分为两类:;单相有刷电机和三相无刷电机(见图4)。单相电机使用两条电源线:热线和中性线,而三相电机使用三条电源线,由三个频率相同的交流电驱动。
音圈
音圈电机是线性直流电机,由两个独立部分组成:磁性外壳和线圈。可以通过在端子两端施加电压来控制运动方向。反转所施加电压的极性将导致相反方向的运动。Prodrive Technologies开发了其音圈电机,设计用于高精度运动和力控制,同时允许6个自由度的运动。不同的形状因子可用,包括矩形和圆柱形,具有不同的电机常数和优化的陡度。
三相电动机
无刷直流
与有刷直流电机不同,顾名思义,无刷直流(BLDC)电机不使用机械刷与线圈建立接触。线圈放置在定子上,磁体安装在转子上。相数与定子上的绕组数相匹配。这样,电流直接施加到线圈,并且需要电子电流相位换向来有效地操作电机。BL电机比有刷电机具有更高的功率重量比、更好的散热和更少的维护。
线性
直线电机和旋转电机一样,有定子和转子。然而,定子和转子“展开”,因此产生线性力而不是旋转力矩。直线电机用于速度和精度规格超过旋转电机和滚珠丝杠能力的直接驱动应用中。Prodrive Technologies为广泛的应用需求开发和制造直线电机,包括铁芯、无铁和真空直线电机。
伺服驱动
伺服驱动器,也称为伺服放大器,是控制器和电机之间的连接,负责为系统中的伺服电机供电。伺服驱动器是评估伺服系统性能的关键部件。在自动加工系统中,伺服驱动器比直功率放大器有几个优势,包括优越的定位、速度和运动控制。本质上,伺服驱动器负责将控制器的低功率命令信号转换为电机的高功率电压和电流。
运动控制器
运动控制器是负责控制运动系统的设备。一般来说,运动控制器运行软件来命令自动机械部件的运动。它们通常被称为运动控制系统的“大脑”。运动控制器通常基于PC,提供图形用户界面以便于使用。在运动控制系统中,控制器也被称为主设备,它提供控制算法、运动轮廓、目标位置,并处理所需的运动轨迹。运动控制器能够管理同一网络上的多个从设备,如I/O设备和驱动器,因此可以管理复杂的多轴系统。